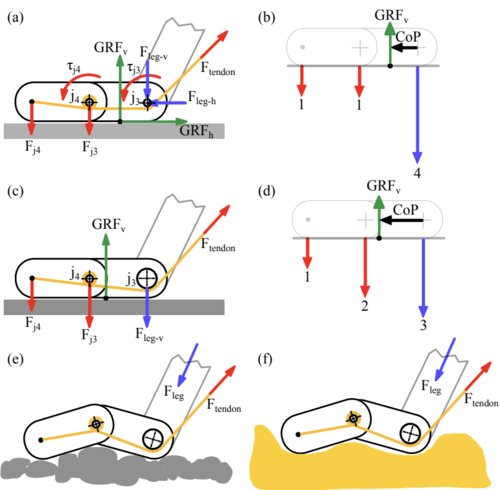
The two-segment leg has a torque-controlled actuator at the hip, and a


Applied Sciences, Free Full-Text

Robots' physical environment

Figure 2 from Dynamic Locomotion Gaits of a Compliantly Actuated

Robots' physical environment

The two-segment leg has a torque-controlled actuator at the hip
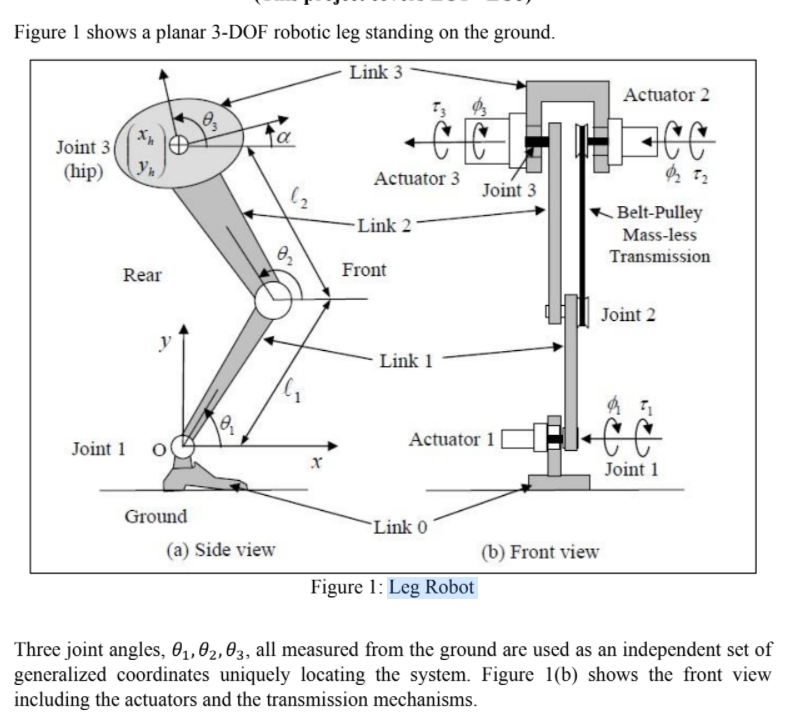
Figure 1 shows a planar 3-DOF robotic leg standing on

Steve Heim's research works Massachusetts Institute of Technology, MA (MIT) and other places

Actuators, Free Full-Text
Publications Dynamic Locomotion - Max Planck Institute for

Controller synthesis and clinical exploration of wearable

Stable running with a two-segment compliant leg

Biomechanics, actuation, and multi-level control strategies of

The two-segment leg has a torque-controlled actuator at the hip
You may also like









